
Author
Hai yếu tố quan trọng để chọn một cảm biến momen xoắn phù hợp là đảm bảo độ chính xác và tránh hư hại. Ngoài ra, cần phải quan tâm đến các yếu tố khác như: phân loại, xem xét về ứng dụng, yếu tố môi trường, yêu cầu về vật lý và chi phí dự trù. Sau bài viết này, hy vọng người đọc sẽ tìm cho mình được một cảm biến momen xoắn phù hợp.
Phân loại cảm biến momen xoắn
1. Cảm biến momen xoắn dạng cảm ứng
Đây là dạng cảm biến không quay được và có phương thức hoạt động tương tự như load cell hoặc đòn bẩy.
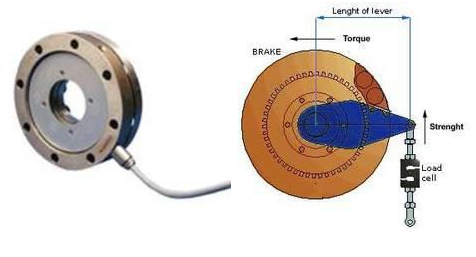 Ưu điểm: không cần quan tâm đến tốc độ vòng quay, không cần nhiều kinh nghiệm để sử dụng và không cần thay đổi cấu trúc của trục quay.
Ưu điểm: không cần quan tâm đến tốc độ vòng quay, không cần nhiều kinh nghiệm để sử dụng và không cần thay đổi cấu trúc của trục quay.
Khuyết điểm: làm giảm thời gian đáp ứng động học, không đo được lực mô men trên trục, độ chính xác không cao như loại gắn trên trục.
2. Cảm biến momen dạng trục quay – vành trượt (slip-ring)
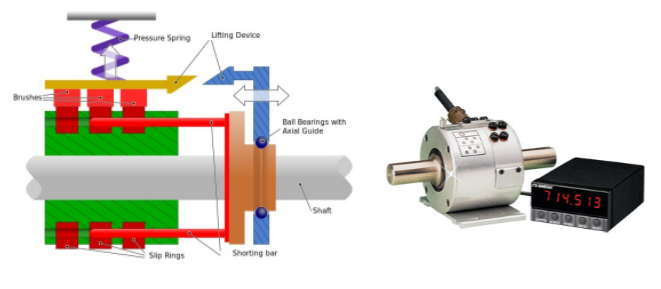 Ưu điểm: giá cả hợp lý, quán tính thấp, thời gian đáp ứng nhanh, điện áp kích thích bằng AC hoặc DC, nhiều tùy chọn lắp ghép
Ưu điểm: giá cả hợp lý, quán tính thấp, thời gian đáp ứng nhanh, điện áp kích thích bằng AC hoặc DC, nhiều tùy chọn lắp ghép
Nhược điểm: chổi than gây ra nhiễu và lỗi, phải bảo trì chổi than, bảo trì vòng đệm, giới hạn về tốc độ vòng quay, độ cứng, nguy cơ sai lệch và mất cân bằng
3. Cảm biến dạng trục quay – biến áp
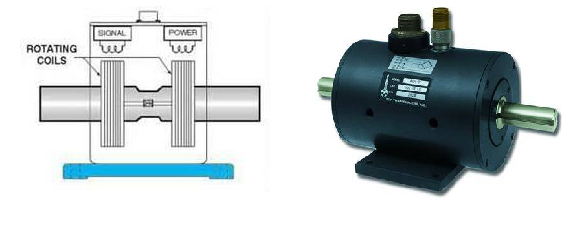
Cảm biến dạng trục quay – biến áp có hình dạng tương tự như cảm biến dạng vành trượt, nhưng ở đây dùng cuộn dây biến áp thay cho chổi than và vành trượt.
Ưu điểm: tốc độ vòng quay lớn hơn cảm biến dạng vành trượt, nhiều tùy chọn lắp ghép, giá thành hợp lý, lực quán tính thấp, truyền dữ liệu không tiếp xúc.
Nhược điểm: bị ảnh hưởng rung động, dùng nguồn kích thích AC, giới hạn về tốc độ vòng quay, ảnh hưởng bởi nhiễu, thời gian đáp ứng chậm.
4. Cảm biến dạng vòng kẹp
Cảm biến dạng vòng kẹp được sử dụng khi không cần tác động đến cơ cấu của trục.
 Ưu điểm: tốc độ vòng quay lớn, có thể đo lực momen xoắn mức thấp, giá thành hợp lý
Ưu điểm: tốc độ vòng quay lớn, có thể đo lực momen xoắn mức thấp, giá thành hợp lý
Nhược điểm: đòi hỏi phải tính toán khi đo, tái sử dụng khó, độ chính xác và độ tin cậy không cao
5. Cảm biến đo từ xa: dạng tương tự và số
 Ưu điểm: nhiễu thấp, tốc độ vòng quay lớn, cứng chắc, truyền dữ liệu không tiếp xúc, thời gian đáp ứng nhanh.
Ưu điểm: nhiễu thấp, tốc độ vòng quay lớn, cứng chắc, truyền dữ liệu không tiếp xúc, thời gian đáp ứng nhanh.
Nhược điểm: lực quán tính cao, nhiều bước chuyển dữ liệu phức tạp, giá thành cao.
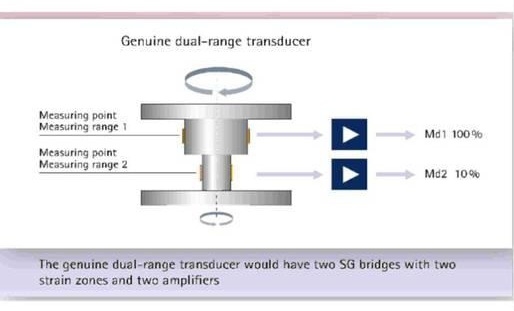
6. Cảm biến khoảng đo kép (dual-range)
Cân nhắc đến ứng dụng cần dùng
Tùy vào ứng dụng của người dùng mà lựa chọn một loại cảm biến phù hợp. Có thể tham khảo thông tin về ứng dụng từ hãng sản xuất hoặc tại bài viết này
http://dbmstore.net/ung-dung-cam-bien-do-mo-men-xoan/
Yêu cầu về độ chính xác
Tùy vào yêu cầu về độ chính xác khi đo lường mà người dùng sẽ chọn một cảm biến phù hợp. Ví dụ, với ứng dụng kiểm tra các chi tiết máy có thể dùng cảm biến độ chính xác thấp, nhưng với ứng dụng đo kiểm động cơ hoặc lực ma sát phải dùng loại có độ chính xác cao hơn.
Khoảng đo
Một trong những yếu tố quan trọng khi chọn cảm biến đó là khoảng đo. Ngoài ra, cần quan tâm đến khả năng hoạt động quá tải của cảm biến để tránh hư hỏng khi sử dụng và một loạt các yếu tố khác như: tốc độ vòng quay, trọng lượng cảm biến, cân bằng, ngõ ra của cảm biến, tần số ngõ ra, thời gian đáp ứng.
Yếu tố môi trường
Cần quan tâm đến các điều kiện về môi trường như: xung điện từ (EMI), ăn mòn, dầu nhớt, bụi bẩn, nhiệt độ, độ ẩm, để tránh gây hư hỏng cảm biến và làm sai lệch kết quả đo.
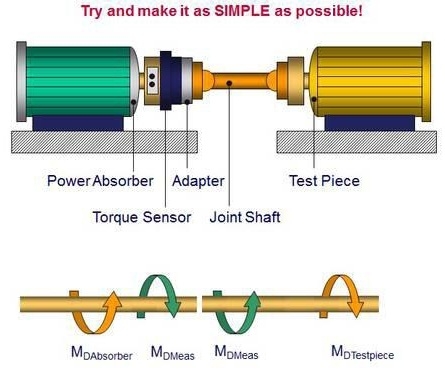
Yếu tố động lực học
Sử dụng mô hình đơn giản với ít bộ phận hơn sẽ giúp giảm thiểu lỗi. Cảm biến và khớp nối nên đặt ở gần trụ đỡ.
Kinh phí dự trù
Các yếu tố ảnh hưởng đến giá thành cảm biến:
Bạn có thể tham khảo thêm tại đây:
http://dbmstore.net/7-yeu-de-chon-mo...-xoan-phu-hop/
Mr. Tuấn - 0976 974 726
Phân loại cảm biến momen xoắn
1. Cảm biến momen xoắn dạng cảm ứng
Đây là dạng cảm biến không quay được và có phương thức hoạt động tương tự như load cell hoặc đòn bẩy.
Khuyết điểm: làm giảm thời gian đáp ứng động học, không đo được lực mô men trên trục, độ chính xác không cao như loại gắn trên trục.
2. Cảm biến momen dạng trục quay – vành trượt (slip-ring)
Nhược điểm: chổi than gây ra nhiễu và lỗi, phải bảo trì chổi than, bảo trì vòng đệm, giới hạn về tốc độ vòng quay, độ cứng, nguy cơ sai lệch và mất cân bằng
3. Cảm biến dạng trục quay – biến áp
Ưu điểm: tốc độ vòng quay lớn hơn cảm biến dạng vành trượt, nhiều tùy chọn lắp ghép, giá thành hợp lý, lực quán tính thấp, truyền dữ liệu không tiếp xúc.
Nhược điểm: bị ảnh hưởng rung động, dùng nguồn kích thích AC, giới hạn về tốc độ vòng quay, ảnh hưởng bởi nhiễu, thời gian đáp ứng chậm.
4. Cảm biến dạng vòng kẹp
Cảm biến dạng vòng kẹp được sử dụng khi không cần tác động đến cơ cấu của trục.
Nhược điểm: đòi hỏi phải tính toán khi đo, tái sử dụng khó, độ chính xác và độ tin cậy không cao
5. Cảm biến đo từ xa: dạng tương tự và số
Nhược điểm: lực quán tính cao, nhiều bước chuyển dữ liệu phức tạp, giá thành cao.
6. Cảm biến khoảng đo kép (dual-range)
Cân nhắc đến ứng dụng cần dùng
Tùy vào ứng dụng của người dùng mà lựa chọn một loại cảm biến phù hợp. Có thể tham khảo thông tin về ứng dụng từ hãng sản xuất hoặc tại bài viết này
http://dbmstore.net/ung-dung-cam-bien-do-mo-men-xoan/
Yêu cầu về độ chính xác
Tùy vào yêu cầu về độ chính xác khi đo lường mà người dùng sẽ chọn một cảm biến phù hợp. Ví dụ, với ứng dụng kiểm tra các chi tiết máy có thể dùng cảm biến độ chính xác thấp, nhưng với ứng dụng đo kiểm động cơ hoặc lực ma sát phải dùng loại có độ chính xác cao hơn.
Khoảng đo
Một trong những yếu tố quan trọng khi chọn cảm biến đó là khoảng đo. Ngoài ra, cần quan tâm đến khả năng hoạt động quá tải của cảm biến để tránh hư hỏng khi sử dụng và một loạt các yếu tố khác như: tốc độ vòng quay, trọng lượng cảm biến, cân bằng, ngõ ra của cảm biến, tần số ngõ ra, thời gian đáp ứng.
Yếu tố môi trường
Cần quan tâm đến các điều kiện về môi trường như: xung điện từ (EMI), ăn mòn, dầu nhớt, bụi bẩn, nhiệt độ, độ ẩm, để tránh gây hư hỏng cảm biến và làm sai lệch kết quả đo.
Yếu tố động lực học
Sử dụng mô hình đơn giản với ít bộ phận hơn sẽ giúp giảm thiểu lỗi. Cảm biến và khớp nối nên đặt ở gần trụ đỡ.
Kinh phí dự trù
Các yếu tố ảnh hưởng đến giá thành cảm biến:
- Tùy biến cấu hình
- Nhiều ngõ ra
- Không tiếp xúc
- Tốc độ vòng quay lớn
- Độ chính xác cao
- Khoảng đo lớn
Bạn có thể tham khảo thêm tại đây:
http://dbmstore.net/7-yeu-de-chon-mo...-xoan-phu-hop/
Mr. Tuấn - 0976 974 726