Author
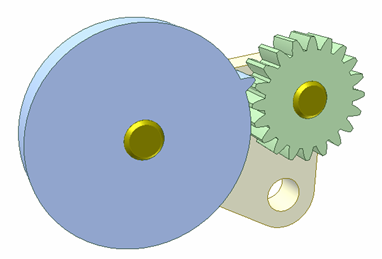
Để biến chuyển động quay liên tục thành quay gián đoạn người ta thường dùng cơ cấu Maltese (http://en.wikipedia.org/wiki/Geneva_drive). Nhưng cơ cấu gồm hai bánh răng sau đây (hình 1) cũng đáp ứng được yêu cầu đó.
Bánh răng chủ động bị bỏ đi một số răng. Số răng đầy đủ khi chưa bỏ là Z1, số răng còn lại là Z1c. Do vậy gọi là bánh răng khuyết.
Bánh răng bị động có đầy đủ số răng là Z2.
Trong thời gian bánh răng chủ động quay được 1 vòng thì bánh răng bị động có lúc quay, có lúc dừng, thực hiện chuyển động quay không liên tục.
Cơ cấu này cho phép dễ dàng phân phối thời gian chạy hoặc dừng của bánh răng bị động bằng cách thêm bớt răng của bánh răng chủ động. Ngoài ra số lần chạy-dừng của bánh răng bị động cũng dễ thay đổi. Ví dụ bánh răng bị động của cơ cấu trên hình 2 chạy 2 lần, dừng 2 lần trong 1 vòng quay của bánh răng chủ động.

Những điểm cần lưu ý khi thiết kế:
1. Tránh nhầm lẫn mà cho rằng nếu bánh chủ động quay 1 vòng thì bánh răng bị động quay đi Z1c/Z2 vòng, bởi vì sự ăn khớp của cơ cấu bánh răng khuyết có khác cơ cấu bánh răng thường.
* Công thức tính góc quay của bánh răng bị động:
bánh răng chủ động quay 1 vòng thì
bánh răng bị động quay (Z1c - 1 + K) / Z2 vòng
Trong đó:
Z1c: số răng còn lại của bánh răng chủ động
Z2: số răng của bánh răng bị động
K: số nguyên lần bước răng đỉnh trong phần cung đỉnh răng của bánh răng bị động giữa hai giao điểm của hai vòng đỉnh răng của hai bánh răng (cung AB)
K = phần nguyên của thương θ2 / (360/Z2)
θ2: góc chắn cung AB tính bằng độ.
2. Phải kiểm tra (bằng cách vẽ hoặc tính toán) để không xẩy ra trường hợp răng đầu tiên của bánh răng chủ động khi vào khớp đẩy vào cung đỉnh răng của răng thuộc bánh răng bị động. Lúc này cơ cấu bị kẹt vì phương của lực đẩy đi qua tâm của bánh răng bị động. Có thể tránh trường hợp này bằng cách thay đổi thông số của cơ cấu, ví dụ số răng Z1, Z2.
3. Trong thời gian dừng, nếu tính tự hãm và lực cản của xích truyền động kể từ bánh răng bị động đến các cơ cấu sau đó không đủ, thì bánh răng bị động có thể bị xê dịch, không bảo đảm đúng vị trí đã thiết kế để ăn khớp tốt. Vậy phải có biện pháp để hãm bánh răng bị động trong thời gian không ăn khớp. Ví dụ dùng phanh điểu khiển bằng cam.
Cơ cấu trên hình sau là một ví dụ khác: bánh răng chủ động có Z1 = 30, Z1c = 18, bánh răng bị động có Z2 = 40, mô đun m = 3. Trong 1 vòng quay của bánh răng chủ động, bánh răng bị động quay đúng 1/2 vòng. Điều này cho phép làm bộ phận hãm như sau: tấm hãm H1 gắn với bánh răng chủ động, 2 tấm hãm H2 gắn với bánh răng bị động. Các tấm hãm này bảo đảm bánh răng bị động không bị xê dịch trong khi ngừng chuyển động. Chú ý rằng trong cơ cấu này, nếu 1 vòng quay của bánh răng chủ động là T giây thì tính được thời gian chuyển động của bánh răng bị động là 0,675T và thời gian dừng là 0,325T.

Có bải viết chi tiết hơn về cơ cấu bánh răng khuyết, download tại:
http://www.mediafire.com/?sharekey=a80b37870699a8ad8d78a0e555291609e6b4a3edab4004a46d217c73094ddc3b
Bài này trước đây đã đưa lên diễn đàn, bị mất do vụ hacker tấn công nay xin đưa lại.
Nhân bài này có một số thành viên đã giới thiệu một vài bộ tryền bánh răng khuyết, xin đưa lại ở đây:
Bộ truyền bánh răng khuyết thay đổi chiều quay của bánh răng bị động:
http://www.youtube.com/watch?v=3aobPgGzB-U&NR=1
Bô. truyền bánh răng khuyết thay đổi vận tốc của bánh răng bị động
http://www.youtube.com/watch?v=qgiiGFp0MKY&NR=1
Bánh răng chủ động bị bỏ đi một số răng. Số răng đầy đủ khi chưa bỏ là Z1, số răng còn lại là Z1c. Do vậy gọi là bánh răng khuyết.
Bánh răng bị động có đầy đủ số răng là Z2.
Trong thời gian bánh răng chủ động quay được 1 vòng thì bánh răng bị động có lúc quay, có lúc dừng, thực hiện chuyển động quay không liên tục.
Cơ cấu này cho phép dễ dàng phân phối thời gian chạy hoặc dừng của bánh răng bị động bằng cách thêm bớt răng của bánh răng chủ động. Ngoài ra số lần chạy-dừng của bánh răng bị động cũng dễ thay đổi. Ví dụ bánh răng bị động của cơ cấu trên hình 2 chạy 2 lần, dừng 2 lần trong 1 vòng quay của bánh răng chủ động.
Những điểm cần lưu ý khi thiết kế:
1. Tránh nhầm lẫn mà cho rằng nếu bánh chủ động quay 1 vòng thì bánh răng bị động quay đi Z1c/Z2 vòng, bởi vì sự ăn khớp của cơ cấu bánh răng khuyết có khác cơ cấu bánh răng thường.
* Công thức tính góc quay của bánh răng bị động:
bánh răng chủ động quay 1 vòng thì
bánh răng bị động quay (Z1c - 1 + K) / Z2 vòng
Trong đó:
Z1c: số răng còn lại của bánh răng chủ động
Z2: số răng của bánh răng bị động
K: số nguyên lần bước răng đỉnh trong phần cung đỉnh răng của bánh răng bị động giữa hai giao điểm của hai vòng đỉnh răng của hai bánh răng (cung AB)
K = phần nguyên của thương θ2 / (360/Z2)
θ2: góc chắn cung AB tính bằng độ.
2. Phải kiểm tra (bằng cách vẽ hoặc tính toán) để không xẩy ra trường hợp răng đầu tiên của bánh răng chủ động khi vào khớp đẩy vào cung đỉnh răng của răng thuộc bánh răng bị động. Lúc này cơ cấu bị kẹt vì phương của lực đẩy đi qua tâm của bánh răng bị động. Có thể tránh trường hợp này bằng cách thay đổi thông số của cơ cấu, ví dụ số răng Z1, Z2.
3. Trong thời gian dừng, nếu tính tự hãm và lực cản của xích truyền động kể từ bánh răng bị động đến các cơ cấu sau đó không đủ, thì bánh răng bị động có thể bị xê dịch, không bảo đảm đúng vị trí đã thiết kế để ăn khớp tốt. Vậy phải có biện pháp để hãm bánh răng bị động trong thời gian không ăn khớp. Ví dụ dùng phanh điểu khiển bằng cam.
Cơ cấu trên hình sau là một ví dụ khác: bánh răng chủ động có Z1 = 30, Z1c = 18, bánh răng bị động có Z2 = 40, mô đun m = 3. Trong 1 vòng quay của bánh răng chủ động, bánh răng bị động quay đúng 1/2 vòng. Điều này cho phép làm bộ phận hãm như sau: tấm hãm H1 gắn với bánh răng chủ động, 2 tấm hãm H2 gắn với bánh răng bị động. Các tấm hãm này bảo đảm bánh răng bị động không bị xê dịch trong khi ngừng chuyển động. Chú ý rằng trong cơ cấu này, nếu 1 vòng quay của bánh răng chủ động là T giây thì tính được thời gian chuyển động của bánh răng bị động là 0,675T và thời gian dừng là 0,325T.
Có bải viết chi tiết hơn về cơ cấu bánh răng khuyết, download tại:
http://www.mediafire.com/?sharekey=a80b37870699a8ad8d78a0e555291609e6b4a3edab4004a46d217c73094ddc3b
Bài này trước đây đã đưa lên diễn đàn, bị mất do vụ hacker tấn công nay xin đưa lại.
Nhân bài này có một số thành viên đã giới thiệu một vài bộ tryền bánh răng khuyết, xin đưa lại ở đây:
Bộ truyền bánh răng khuyết thay đổi chiều quay của bánh răng bị động:
http://www.youtube.com/watch?v=3aobPgGzB-U&NR=1
Bô. truyền bánh răng khuyết thay đổi vận tốc của bánh răng bị động
http://www.youtube.com/watch?v=qgiiGFp0MKY&NR=1
Last edited by a moderator: