Xin hỏi sự khác nhau và cách dùng RBE2, RBE3 và MPC trong Optistruct
- Thread starter discovery88
- Ngày mở chủ đề

U
Tiểu đề: MPC, RBE trong Optistruct và nhiều mềm khác ...
1) MPC Multi Point Constraints: Khi nén 2 vật thể tiếp xúc nhau, thường phải tính material nonlinear elasto-plastic khá lâu. Đôi khi ko hội tụ , ko kết quả !!
Làm giản dị, tính nhanh gần đúng: với material linear, Có đầu tiên từ NASTRAN dùng MPC: Phối hợp số nút của vật thể có thể chịu nén với nhau.
MPC được các mềm khác như Abaqus, Ansys tựa theo, phát triển sâu hơn cho các ngàm, khớp ở mô hình với phần tử Shell, Solid. Opistruct làm rất giãn dị cho kết hợp cứng lại.
Xem:
https://altairuniversity.com/wp-con...72-MPC-CONTACT-CGAP-G-based-Fast-Contact..pdf
...
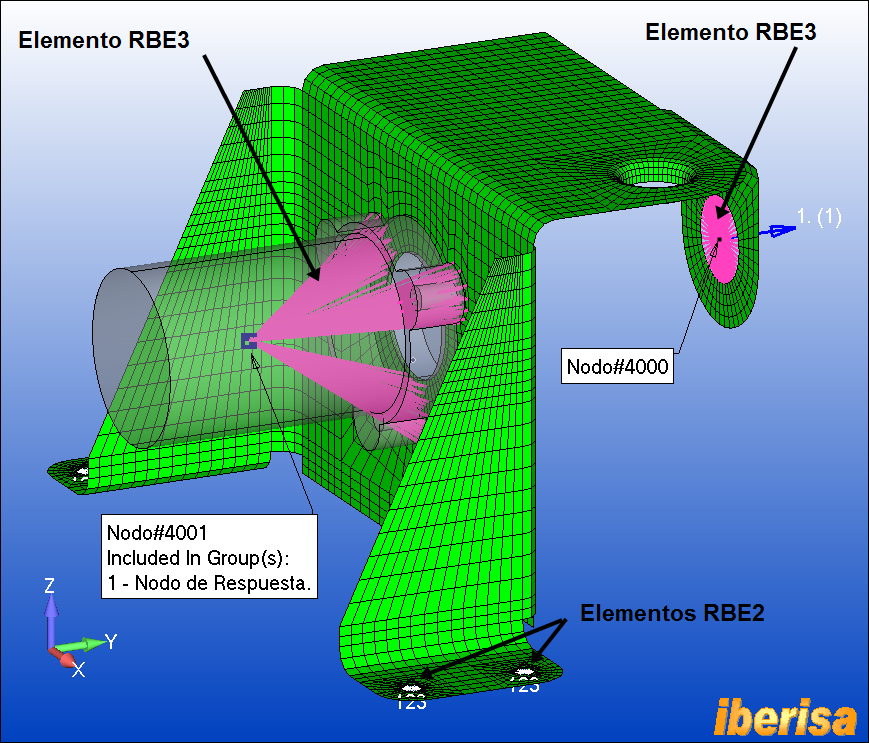
2) RBE2, RBE3 Rigid Body Elements , ... Liên kết một với nhiều nút (phần tử) hoạc ngược lại.
> Để các KS" trẻ" dể xơi !
Lời khuyên:
- RBE2: nên dùng làm Gối
- RBE3: nên dùng để truyền Lực
Xem thêm:
https://www.quora.com/What-is-RBE2-...at-is-the-use-of-that-element-with-an-example

Jack Chessa, Professor of Mechanical Engineering at The University of Texas at El Paso

1) MPC Multi Point Constraints: Khi nén 2 vật thể tiếp xúc nhau, thường phải tính material nonlinear elasto-plastic khá lâu. Đôi khi ko hội tụ , ko kết quả !!
Làm giản dị, tính nhanh gần đúng: với material linear, Có đầu tiên từ NASTRAN dùng MPC: Phối hợp số nút của vật thể có thể chịu nén với nhau.
MPC được các mềm khác như Abaqus, Ansys tựa theo, phát triển sâu hơn cho các ngàm, khớp ở mô hình với phần tử Shell, Solid. Opistruct làm rất giãn dị cho kết hợp cứng lại.
Xem:
https://altairuniversity.com/wp-con...72-MPC-CONTACT-CGAP-G-based-Fast-Contact..pdf
...
2) RBE2, RBE3 Rigid Body Elements , ... Liên kết một với nhiều nút (phần tử) hoạc ngược lại.
> Để các KS" trẻ" dể xơi !
Lời khuyên:
- RBE2: nên dùng làm Gối
- RBE3: nên dùng để truyền Lực
Xem thêm:
https://www.quora.com/What-is-RBE2-...at-is-the-use-of-that-element-with-an-example
Jack Chessa, Professor of Mechanical Engineering at The University of Texas at El Paso
Last edited by a moderator:
U
Bạn có thểm tham khảo thêm :
Video hướng dẫn của Altair :
Tài liệu của công ty NST VN : http://cae-nst.com.vn/2017/02/27/phan-biet-phan-tu-rbe2-va-rbe3/
Video hướng dẫn của Altair :
U
Bạn có thểm tham khảo thêm :
Video hướng dẫn của Altair :
Tài liệu của công ty NST VN : http://cae-nst.com.vn/2017/02/27/phan-biet-phan-tu-rbe2-va-rbe3/
Video hướng dẫn của Altair :
U
https://www.predictiveengineering.c...small-connection-elements-rbe2-rbe3-and-cbush
kích chuột vào phần cuối, có bài giãi thích 40 Trang về RBE2 - RBE3 and CBUSH cho FEA Modeling

PDF Download:
 predictive_engineering_white_paper_on_nx_nastran_connection_elements_rbe2_rbe3_and_cbush_rev-1.pdf
predictive_engineering_white_paper_on_nx_nastran_connection_elements_rbe2_rbe3_and_cbush_rev-1.pdf
kích chuột vào phần cuối, có bài giãi thích 40 Trang về RBE2 - RBE3 and CBUSH cho FEA Modeling
PDF Download:
Chào bác umy và các bạn
Sau đây là cách hiểu của cháu, viết ra để các bạn chưa rõ có thể tham khảo:
1) SPC = single point constraint : thực ra nên gọi là single dof constraint vì nó là ràng buộc một bậc tự do
ví dụ u1x = 0 là ràng buộc nhằm cố định node 1 theo phương x (chuyển vị node 1 theo x bằng 0)
SPCD: cũng vậy nhưng có điều vế phải khác 0, dùng khi ta muốn cho node di chuyển một lượng nào đó
ví dụ u2y = 1.5 nghĩa là cho node 2 di chuyển theo phương y là 1.5
khi construct ma trận độ cứng thì cái SPCD nó tương đương với một (tập hợp) lực tác động lên (một số) node.
Nếu bạn nào dùng hypermesh để tạo constraint thì để ý bên cạnh các ô chọn dof sẽ có chỗ để nhập giá trị chuyển vị ở bên phải (thường mặc định là 0)
sách nước ngoài gọi SPC là homogenous, còn SPCD là non-homogenous (dịch là ràng buộc đồng nhất / không đồng nhất, có lẽ nên dịch là ràng buộc cố định / dịch chuyển)
bạn nào dùng nastran hay optistruct thì chú ý là ràng buộc này áp dụng cho chuyển vị trong hệ GLOBAL (không phải là cái hệ xanh đỏ ở góc màn hình đâu nhé). Hệ GLOBAL là tập hợp các hệ trục định nghĩa trong dữ liệu "CD" của node, thường là CD=0 thì GLOBAL trùng với cái hệ xanh đỏ ở góc màn hình, nếu ta muốn ràng buộc chuyển vị theo một hướng bất kỳ thì cần tạo một hệ trục tham chiếu và gán nó vào "CD" của node.
2) Auto SPC: một số dof "thừa" cần phải được fix, nếu user không fix thì có thể solver (như optistruct) sẽ tự fix, cần phải đọc output để kiểm tra kỹ xem chỗ nào được auto SPC, và solver tự fix thế có hợp lý không, nếu không là kết quả tào lao ngay. Ví dụ gắn beam vuông góc với shell rồi áp mô-men xoắn vào là gay go
3) MPC = multi-point constraint: nên gọi là multi-dof constraint nghĩa là ràng buộc nhiều bậc tự do
ví dụ r1x = 2*r2x , nghĩa là góc xoay của node 1 quanh x bằng 2 lần góc quay của node 2 quanh x
có thể hiểu node 1 và node 2 đang truyền chuyển động cho nhau như là 2 bánh răng song song với số răng bánh 2 gấp đôi số răng bánh 1
nếu ràng buộc r1x = 2*r2y thì cũng như truyền động giữa 2 bánh răng côn vuông góc
có thể thấy rằng MPC có thể tạo ra những ràng buộc phức tạp không chỉ giữa 2 mà nhiều dof của nhiều node khác nhau.
viết lại các biểu thức trên ta có: 1 * r1x - 2 * r2x = 0, 1 * r1x - 2 * r2y = 0
như vậy các phương trình MPC có dạng ∑ai.Di = 0 trong đó 'ai' là các hệ số còn 'Di' là các giá trị chuyển vị cần ràng buộc
nếu i = 1 thì ta có SPC
nastran còn có định nghĩa MPCD tức là khi vế phải của phương trình khác 0, hình như optistruct không có định nghĩa này.
4) RBE2 = rigid body element , có thể dịch là phần tử nối cứng, thực ra không phải là phần tử mà là những phương trình ràng buộc cứng các node với nhau (solver sẽ tạo ra các phương trình mpc này)
trong optistruct hay nastran có thể chọn dof nào được ràng buộc còn dof nào được thả, do đó có thể mô tả các liên kết khớp nối.
thường thường hay dùng để ràng buộc cả 6 dof khi đó RBE2 giống như một rigid body, solver lsdyna gọi là "nodal rigid body"
5) RBE3 : không phải là rigid body element,
dùng để phân bố lực và mô men từ một điểm (reference point) tới các chân, sự phân bố phụ thuộc vào các trọng số "weight factor" và hình dáng phần tử.
RBE3 rất hay dùng để mô tả tiếp xúc, mối hàn.
Sau đây là cách hiểu của cháu, viết ra để các bạn chưa rõ có thể tham khảo:
1) SPC = single point constraint : thực ra nên gọi là single dof constraint vì nó là ràng buộc một bậc tự do
ví dụ u1x = 0 là ràng buộc nhằm cố định node 1 theo phương x (chuyển vị node 1 theo x bằng 0)
SPCD: cũng vậy nhưng có điều vế phải khác 0, dùng khi ta muốn cho node di chuyển một lượng nào đó
ví dụ u2y = 1.5 nghĩa là cho node 2 di chuyển theo phương y là 1.5
khi construct ma trận độ cứng thì cái SPCD nó tương đương với một (tập hợp) lực tác động lên (một số) node.
Nếu bạn nào dùng hypermesh để tạo constraint thì để ý bên cạnh các ô chọn dof sẽ có chỗ để nhập giá trị chuyển vị ở bên phải (thường mặc định là 0)
sách nước ngoài gọi SPC là homogenous, còn SPCD là non-homogenous (dịch là ràng buộc đồng nhất / không đồng nhất, có lẽ nên dịch là ràng buộc cố định / dịch chuyển)
bạn nào dùng nastran hay optistruct thì chú ý là ràng buộc này áp dụng cho chuyển vị trong hệ GLOBAL (không phải là cái hệ xanh đỏ ở góc màn hình đâu nhé). Hệ GLOBAL là tập hợp các hệ trục định nghĩa trong dữ liệu "CD" của node, thường là CD=0 thì GLOBAL trùng với cái hệ xanh đỏ ở góc màn hình, nếu ta muốn ràng buộc chuyển vị theo một hướng bất kỳ thì cần tạo một hệ trục tham chiếu và gán nó vào "CD" của node.
2) Auto SPC: một số dof "thừa" cần phải được fix, nếu user không fix thì có thể solver (như optistruct) sẽ tự fix, cần phải đọc output để kiểm tra kỹ xem chỗ nào được auto SPC, và solver tự fix thế có hợp lý không, nếu không là kết quả tào lao ngay. Ví dụ gắn beam vuông góc với shell rồi áp mô-men xoắn vào là gay go
3) MPC = multi-point constraint: nên gọi là multi-dof constraint nghĩa là ràng buộc nhiều bậc tự do
ví dụ r1x = 2*r2x , nghĩa là góc xoay của node 1 quanh x bằng 2 lần góc quay của node 2 quanh x
có thể hiểu node 1 và node 2 đang truyền chuyển động cho nhau như là 2 bánh răng song song với số răng bánh 2 gấp đôi số răng bánh 1
nếu ràng buộc r1x = 2*r2y thì cũng như truyền động giữa 2 bánh răng côn vuông góc
có thể thấy rằng MPC có thể tạo ra những ràng buộc phức tạp không chỉ giữa 2 mà nhiều dof của nhiều node khác nhau.
viết lại các biểu thức trên ta có: 1 * r1x - 2 * r2x = 0, 1 * r1x - 2 * r2y = 0
như vậy các phương trình MPC có dạng ∑ai.Di = 0 trong đó 'ai' là các hệ số còn 'Di' là các giá trị chuyển vị cần ràng buộc
nếu i = 1 thì ta có SPC
nastran còn có định nghĩa MPCD tức là khi vế phải của phương trình khác 0, hình như optistruct không có định nghĩa này.
4) RBE2 = rigid body element , có thể dịch là phần tử nối cứng, thực ra không phải là phần tử mà là những phương trình ràng buộc cứng các node với nhau (solver sẽ tạo ra các phương trình mpc này)
trong optistruct hay nastran có thể chọn dof nào được ràng buộc còn dof nào được thả, do đó có thể mô tả các liên kết khớp nối.
thường thường hay dùng để ràng buộc cả 6 dof khi đó RBE2 giống như một rigid body, solver lsdyna gọi là "nodal rigid body"
5) RBE3 : không phải là rigid body element,
dùng để phân bố lực và mô men từ một điểm (reference point) tới các chân, sự phân bố phụ thuộc vào các trọng số "weight factor" và hình dáng phần tử.
RBE3 rất hay dùng để mô tả tiếp xúc, mối hàn.
U
Chào bác umy và các bạn
Sau đây là cách hiểu của cháu, viết ra để các bạn chưa rõ có thể tham khảo:
1) SPC = single point constraint : thực ra nên gọi là single dof constraint vì nó là ràng buộc một bậc tự do
ví dụ u1x = 0 là ràng buộc nhằm cố định node 1 theo phương x (chuyển vị node 1 theo x bằng 0)
SPCD: cũng vậy nhưng có điều vế phải khác 0, dùng khi ta muốn cho node di chuyển một lượng nào đó
ví dụ u2y = 1.5 nghĩa là cho node 2 di chuyển theo phương y là 1.5
khi construct ma trận độ cứng thì cái SPCD nó tương đương với một (tập hợp) lực tác động lên (một số) node.
Nếu bạn nào dùng hypermesh để tạo constraint thì để ý bên cạnh các ô chọn dof sẽ có chỗ để nhập giá trị chuyển vị ở bên phải (thường mặc định là 0)
sách nước ngoài gọi SPC là homogenous, còn SPCD là non-homogenous (dịch là ràng buộc đồng nhất / không đồng nhất, có lẽ nên dịch là ràng buộc cố định / dịch chuyển)
bạn nào dùng nastran hay optistruct thì chú ý là ràng buộc này áp dụng cho chuyển vị trong hệ GLOBAL (không phải là cái hệ xanh đỏ ở góc màn hình đâu nhé). Hệ GLOBAL là tập hợp các hệ trục định nghĩa trong dữ liệu "CD" của node, thường là CD=0 thì GLOBAL trùng với cái hệ xanh đỏ ở góc màn hình, nếu ta muốn ràng buộc chuyển vị theo một hướng bất kỳ thì cần tạo một hệ trục tham chiếu và gán nó vào "CD" của node.
2) Auto SPC: một số dof "thừa" cần phải được fix, nếu user không fix thì có thể solver (như optistruct) sẽ tự fix, cần phải đọc output để kiểm tra kỹ xem chỗ nào được auto SPC, và solver tự fix thế có hợp lý không, nếu không là kết quả tào lao ngay. Ví dụ gắn beam vuông góc với shell rồi áp mô-men xoắn vào là gay go
3) MPC = multi-point constraint: nên gọi là multi-dof constraint nghĩa là ràng buộc nhiều bậc tự do
ví dụ r1x = 2*r2x , nghĩa là góc xoay của node 1 quanh x bằng 2 lần góc quay của node 2 quanh x
có thể hiểu node 1 và node 2 đang truyền chuyển động cho nhau như là 2 bánh răng song song với số răng bánh 2 gấp đôi số răng bánh 1
nếu ràng buộc r1x = 2*r2y thì cũng như truyền động giữa 2 bánh răng côn vuông góc
có thể thấy rằng MPC có thể tạo ra những ràng buộc phức tạp không chỉ giữa 2 mà nhiều dof của nhiều node khác nhau.
viết lại các biểu thức trên ta có: 1 * r1x - 2 * r2x = 0, 1 * r1x - 2 * r2y = 0
như vậy các phương trình MPC có dạng ∑ai.Di = 0 trong đó 'ai' là các hệ số còn 'Di' là các giá trị chuyển vị cần ràng buộc
nếu i = 1 thì ta có SPC
nastran còn có định nghĩa MPCD tức là khi vế phải của phương trình khác 0, hình như optistruct không có định nghĩa này.
4) RBE2 = rigid body element , có thể dịch là phần tử nối cứng, thực ra không phải là phần tử mà là những phương trình ràng buộc cứng các node với nhau (solver sẽ tạo ra các phương trình mpc này)
trong optistruct hay nastran có thể chọn dof nào được ràng buộc còn dof nào được thả, do đó có thể mô tả các liên kết khớp nối.
thường thường hay dùng để ràng buộc cả 6 dof khi đó RBE2 giống như một rigid body, solver lsdyna gọi là "nodal rigid body"
5) RBE3 : không phải là rigid body element,
dùng để phân bố lực và mô men từ một điểm (reference point) tới các chân, sự phân bố phụ thuộc vào các trọng số "weight factor" và hình dáng phần tử.
RBE3 rất hay dùng để mô tả tiếp xúc, mối hàn.
Sau đây là cách hiểu của cháu, viết ra để các bạn chưa rõ có thể tham khảo:
1) SPC = single point constraint : thực ra nên gọi là single dof constraint vì nó là ràng buộc một bậc tự do
ví dụ u1x = 0 là ràng buộc nhằm cố định node 1 theo phương x (chuyển vị node 1 theo x bằng 0)
SPCD: cũng vậy nhưng có điều vế phải khác 0, dùng khi ta muốn cho node di chuyển một lượng nào đó
ví dụ u2y = 1.5 nghĩa là cho node 2 di chuyển theo phương y là 1.5
khi construct ma trận độ cứng thì cái SPCD nó tương đương với một (tập hợp) lực tác động lên (một số) node.
Nếu bạn nào dùng hypermesh để tạo constraint thì để ý bên cạnh các ô chọn dof sẽ có chỗ để nhập giá trị chuyển vị ở bên phải (thường mặc định là 0)
sách nước ngoài gọi SPC là homogenous, còn SPCD là non-homogenous (dịch là ràng buộc đồng nhất / không đồng nhất, có lẽ nên dịch là ràng buộc cố định / dịch chuyển)
bạn nào dùng nastran hay optistruct thì chú ý là ràng buộc này áp dụng cho chuyển vị trong hệ GLOBAL (không phải là cái hệ xanh đỏ ở góc màn hình đâu nhé). Hệ GLOBAL là tập hợp các hệ trục định nghĩa trong dữ liệu "CD" của node, thường là CD=0 thì GLOBAL trùng với cái hệ xanh đỏ ở góc màn hình, nếu ta muốn ràng buộc chuyển vị theo một hướng bất kỳ thì cần tạo một hệ trục tham chiếu và gán nó vào "CD" của node.
2) Auto SPC: một số dof "thừa" cần phải được fix, nếu user không fix thì có thể solver (như optistruct) sẽ tự fix, cần phải đọc output để kiểm tra kỹ xem chỗ nào được auto SPC, và solver tự fix thế có hợp lý không, nếu không là kết quả tào lao ngay. Ví dụ gắn beam vuông góc với shell rồi áp mô-men xoắn vào là gay go
3) MPC = multi-point constraint: nên gọi là multi-dof constraint nghĩa là ràng buộc nhiều bậc tự do
ví dụ r1x = 2*r2x , nghĩa là góc xoay của node 1 quanh x bằng 2 lần góc quay của node 2 quanh x
có thể hiểu node 1 và node 2 đang truyền chuyển động cho nhau như là 2 bánh răng song song với số răng bánh 2 gấp đôi số răng bánh 1
nếu ràng buộc r1x = 2*r2y thì cũng như truyền động giữa 2 bánh răng côn vuông góc
có thể thấy rằng MPC có thể tạo ra những ràng buộc phức tạp không chỉ giữa 2 mà nhiều dof của nhiều node khác nhau.
viết lại các biểu thức trên ta có: 1 * r1x - 2 * r2x = 0, 1 * r1x - 2 * r2y = 0
như vậy các phương trình MPC có dạng ∑ai.Di = 0 trong đó 'ai' là các hệ số còn 'Di' là các giá trị chuyển vị cần ràng buộc
nếu i = 1 thì ta có SPC
nastran còn có định nghĩa MPCD tức là khi vế phải của phương trình khác 0, hình như optistruct không có định nghĩa này.
4) RBE2 = rigid body element , có thể dịch là phần tử nối cứng, thực ra không phải là phần tử mà là những phương trình ràng buộc cứng các node với nhau (solver sẽ tạo ra các phương trình mpc này)
trong optistruct hay nastran có thể chọn dof nào được ràng buộc còn dof nào được thả, do đó có thể mô tả các liên kết khớp nối.
thường thường hay dùng để ràng buộc cả 6 dof khi đó RBE2 giống như một rigid body, solver lsdyna gọi là "nodal rigid body"
5) RBE3 : không phải là rigid body element,
dùng để phân bố lực và mô men từ một điểm (reference point) tới các chân, sự phân bố phụ thuộc vào các trọng số "weight factor" và hình dáng phần tử.
RBE3 rất hay dùng để mô tả tiếp xúc, mối hàn.
Để các Member trẻ ko những hiểu được các từ chuyên môn (hạng Pro) mà còn cất cánh bay cao như chim bằng,
Xin Anh f06 đưa ra thêm vài thí dụ (áp dụng trong các bài tính thực tiển)
- tùy theo loại mềm nào
- trong lỉnh vực, cho bài tính nào
- giải thích ngắn, cách sử dụng
- nên có Tài liệu và Hình ảnh kèm theo >> dể hiểu cho tự học thêm.
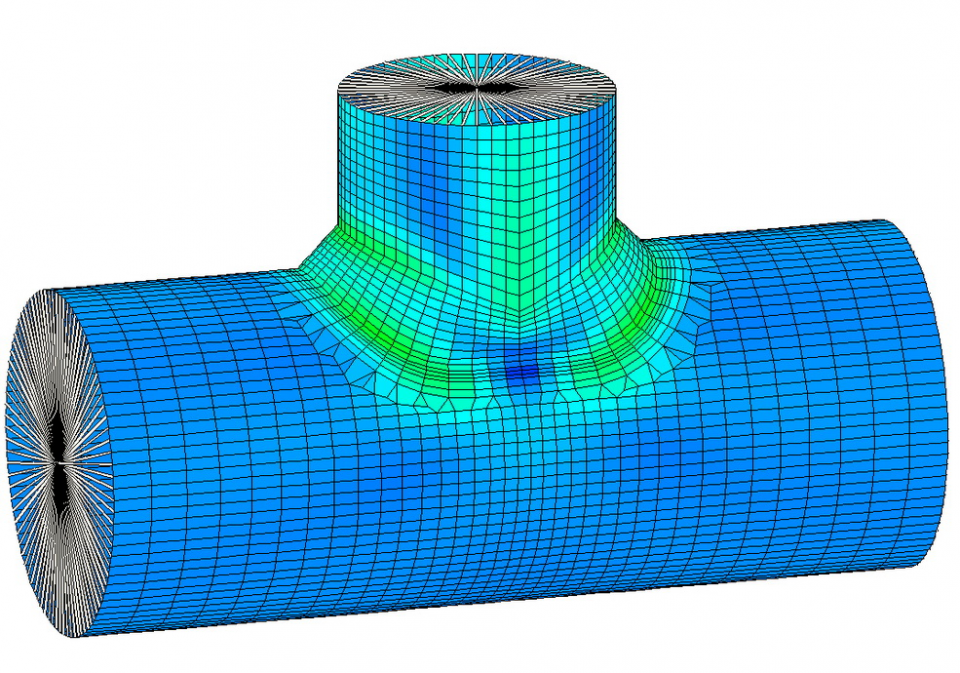
Một hình ảnh thí dụ: Bình bầu, Pipe_ T-Piece
Chào bác umy.
cháu không phải giảng viên hay nghiên cứu sinh. Trước cháu làm về tạo mô hình phần tử hữu hạn cho các chi tiết ô tô, thấy có rất nhiều liên kết sử dụng rbe2, rbe3 như trên nên cháu tự tìm tài liệu để đọc xem chúng ra sao. Tất cả các giải thích ở trên có thể thấy trong chính tài liệu (Help document) của nastran, bạn nào cài phần mềm thì có trong máy không thì google sẽ ra (https://simcompanion.mscsoftware.com/infocenter/index?page=content&id=DOC11628 )
cháu nghĩ các bạn ko hiểu rõ lắm do các bạn mới làm chưa kiên nhẫn đọc tài liệu hoặc ko hiểu tài liệu tiếng anh, hoặc cả hai.
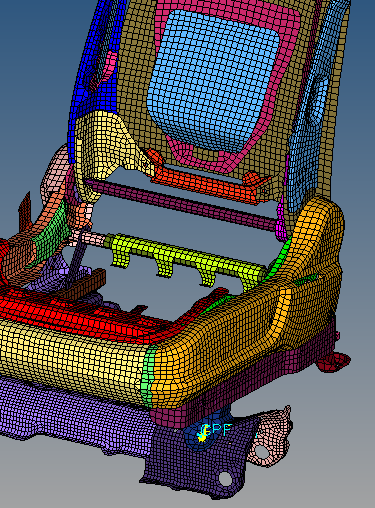
một số ví dụ: (hình chụp là mô hình xe https://www.nhtsa.gov/crash-simulation-vehicle-models )
- loại mềm (phần mềm): nastran
- bài tính: rung động
- lĩnh vực: ô-tô
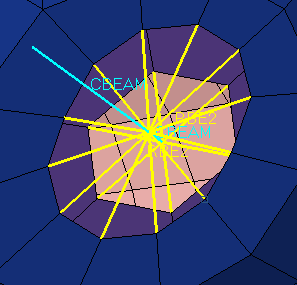
- mô tả tiếp xúc giữa ống lót và thanh trượt của cái gối đầu ở ghế xe, mô tả bằng RBE3+CBUSH+RBE3
- cách sử dụng: một phần tử CBUSH 2 đầu nối với node phụ thuộc (dependent node) của 2 phần tử RBE3, các chân của RBE3 này nối với ống lót, của RBE3 kia nối với thanh trượt. đặc tính tiếp xúc (độ cứng) được gán vào phần tử CBUSH
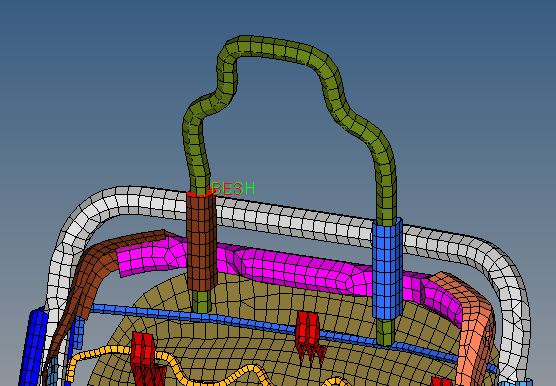
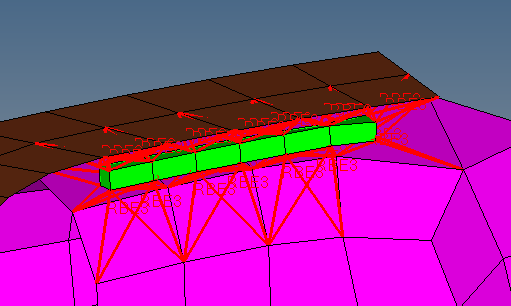
- mô tả đường hàn giữa hai chi tiết bằng RBE3 + hexa + RBE3
- cách dùng: cũng tương tự như trên có điều thay CBUSH bằng phần tử hexa
hình trên có nhiều RBE3 có chung node ở chân, việc này không gây ra vấn đề gì vì chân của RBE3 là các node độc lập (independent nodes)
chỉ có các phần tử RBE2 là không được có chung node ở chân, vì ngược với RBE3 thì chân của RBE2 là các node phụ thuộc, do đó chúng chỉ được phụ thuộc vào 1 phần tử RBE2
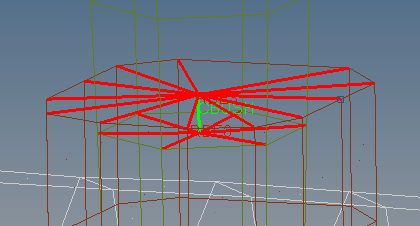
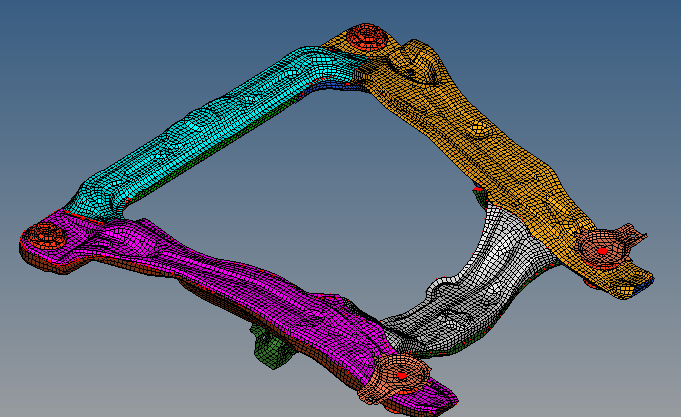
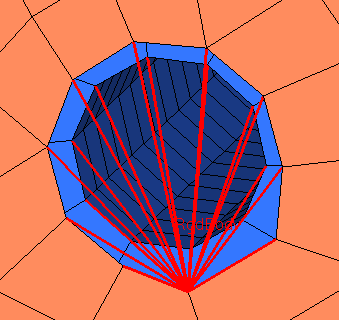
- mô tả liên kết bu-lông bằng RBE2-CBEAM-RBE2
- cách dùng: dùng các phần tử RBE2 nối từng lỗ bu-lông trên từng chi tiết, dùng CBEAM nối các node độc lập của các phần tử RBE2
- mềm: lsdyna
- bài tính: va chạm
- mô tả liên kết bu-lông bằng RBE2 (lsdyna gọi là RBODY)
- cách dùng: nối các node ở các lỗ cần liên kết bằng một phần tử RBODY sao cho node độc lập cũng là một node ở lỗ liên kết. Vì lsdyna không cho phép các node tự do mà không có khối lượng (massless node) nên nếu có node tự do, lsdyna sẽ tự thêm một chất điểm có khối lượng nhỏ vào.
cháu nghĩ các bạn nào muốn tự học thêm thì cứ xem phần help document của phần mềm là có rất nhiều thông tin rồi. cần kiên nhẫn đọc chỗ nào không hiểu thì trích dẫn ra để hỏi cụ thể thì tốt hơn là hỏi chung chung như bạn post bài này.
cháu không phải giảng viên hay nghiên cứu sinh. Trước cháu làm về tạo mô hình phần tử hữu hạn cho các chi tiết ô tô, thấy có rất nhiều liên kết sử dụng rbe2, rbe3 như trên nên cháu tự tìm tài liệu để đọc xem chúng ra sao. Tất cả các giải thích ở trên có thể thấy trong chính tài liệu (Help document) của nastran, bạn nào cài phần mềm thì có trong máy không thì google sẽ ra (https://simcompanion.mscsoftware.com/infocenter/index?page=content&id=DOC11628 )
cháu nghĩ các bạn ko hiểu rõ lắm do các bạn mới làm chưa kiên nhẫn đọc tài liệu hoặc ko hiểu tài liệu tiếng anh, hoặc cả hai.
một số ví dụ: (hình chụp là mô hình xe https://www.nhtsa.gov/crash-simulation-vehicle-models )
- loại mềm (phần mềm): nastran
- bài tính: rung động
- lĩnh vực: ô-tô
- mô tả tiếp xúc giữa ống lót và thanh trượt của cái gối đầu ở ghế xe, mô tả bằng RBE3+CBUSH+RBE3
- cách sử dụng: một phần tử CBUSH 2 đầu nối với node phụ thuộc (dependent node) của 2 phần tử RBE3, các chân của RBE3 này nối với ống lót, của RBE3 kia nối với thanh trượt. đặc tính tiếp xúc (độ cứng) được gán vào phần tử CBUSH
- mô tả đường hàn giữa hai chi tiết bằng RBE3 + hexa + RBE3
- cách dùng: cũng tương tự như trên có điều thay CBUSH bằng phần tử hexa
hình trên có nhiều RBE3 có chung node ở chân, việc này không gây ra vấn đề gì vì chân của RBE3 là các node độc lập (independent nodes)
chỉ có các phần tử RBE2 là không được có chung node ở chân, vì ngược với RBE3 thì chân của RBE2 là các node phụ thuộc, do đó chúng chỉ được phụ thuộc vào 1 phần tử RBE2
- mô tả liên kết bu-lông bằng RBE2-CBEAM-RBE2
- cách dùng: dùng các phần tử RBE2 nối từng lỗ bu-lông trên từng chi tiết, dùng CBEAM nối các node độc lập của các phần tử RBE2
- mềm: lsdyna
- bài tính: va chạm
- mô tả liên kết bu-lông bằng RBE2 (lsdyna gọi là RBODY)
- cách dùng: nối các node ở các lỗ cần liên kết bằng một phần tử RBODY sao cho node độc lập cũng là một node ở lỗ liên kết. Vì lsdyna không cho phép các node tự do mà không có khối lượng (massless node) nên nếu có node tự do, lsdyna sẽ tự thêm một chất điểm có khối lượng nhỏ vào.
cháu nghĩ các bạn nào muốn tự học thêm thì cứ xem phần help document của phần mềm là có rất nhiều thông tin rồi. cần kiên nhẫn đọc chỗ nào không hiểu thì trích dẫn ra để hỏi cụ thể thì tốt hơn là hỏi chung chung như bạn post bài này.
U
Trich:
https://feaforall.com/rbe2-vs-rbe3/
RBE2 VS RBE3
February 22, 2016 by Cyprien 5 Comments
RBE2 and RBE3 are basically rigid elements that are use to connect mesh sets together.
The name is similar, but there is a fundamental difference between them:
RBE2 transmits the displacements and RBE3 transmits the Loads (MPC Forces)
https://feaforall.com/rbe2-vs-rbe3/
RBE2 VS RBE3
February 22, 2016 by Cyprien 5 Comments
RBE2 and RBE3 are basically rigid elements that are use to connect mesh sets together.
The name is similar, but there is a fundamental difference between them:
RBE2 transmits the displacements and RBE3 transmits the Loads (MPC Forces)