
Author
Ròng rọc dây kéo dùng để giảm và chuyển hướng tác dụng của lực kéo. Thời xưa, ròng rọc dây kéo được dùng phổ biến và nghiên cứu kỹ, có nhiều điều hay. Ôn cũ biết mới là điều nên làm vậy. Các hình dưới đây lấy từ sách của Mỹ những năm 1800.
1. Ròng rọc White (hình 15) là cơ cấu rất thú vị.
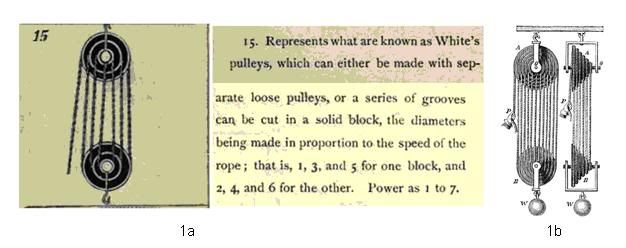
Dịch: Hình 15 cho thấy cơ cấu gọi là ròng rọc White. Cơ cấu này có thể gồm các ròng rọc lồng không riêng rẽ hoặc một khối đặc trên đó có các rãnh mà đường kính của chúng tỷ lệ với vận tốc của dây; tức là 1, 3 và 5 trên một khối và 2, 4 và 6 cho khối kia. Hệ số tăng lực từ 1 đến 7 (?).
Cơ cấu này là sáng chế của James White in trong cuốn "A new century of inventions" của ông xuất bản năm 1822, 529 trang, mô tả 100 loại máy, có trên Internet, download được.
Hình 1b là ròng rọc White mà mỗi khối có đến 6 ròng rọc.
Nếu mỗi khối là các ròng rọc lồng không riêng rẽ thì giống cơ cấu trên hình 14 dưới đây, hệ số giảm lực bằng 2 lần số ròng rọc động ở khối dưới (có trục di động). Nhược điểm là phải tách đủ xa các ròng rọc để chúng không cọ vào nhau gây mòn, kết cấu cũng phức tạp.
Nếu khối trên và khối dưới gồm các ròng rọc ghép cứng với nhau, đường kính bằng nhau thì tránh được nhược điểm trên nhưng dây sẽ trượt trên ròng rọc, gây mòn nhanh. Để tránh trượt dây, người ta làm đường kính rãnh dây khác nhau theo tỷ lệ nêu trên.
► Mời các bạn nghiệm lại kết quả tính toán của người xưa về các tỷ lệ 1, 3, 5 và 2, 4, 6 cho ròng rọc hình 1a. Cũng không dễ đâu.
2. Hình dưới đây là các kiểu phối hợp dây kéo và ròng rọc.

Cơ cấu hình 12, 13, 14 đã quen nhưng hình 16 đến 22 thì lạ rồi.
► Mời các bạn tính lực P kéo ở đầu dây để nâng trọng lượng Q cho các hình này.
Chú ý là lực căng trên các nhánh của cùng 1 dây kéo luôn bằng nhau.
Kết quả của tôi như sau (nếu sai thì sửa giúp):
Hình 12: P = Q (có tác dụng chuyển hướng kéo)
Hình 13: P = Q/2
Hình 14: P = Q/6
Hình 16: P = Q/4
Hình 18: P = Q/3
Hình 19: P = Q/26
Hình 20: P = Q/7
Hình 21: P = Q/3
Hình 22: P = Q/8
Riêng hình 17 có nhánh dây xiên góc α so với phương thẳng đứng. Góc này thay đổi trong quá trình kéo. Một cách gần đúng, coi góc của lực kéo P cũng là α. Kết quả: P = Q/(5cosα).
3. Cơ cấu sau (hình 3a, sách Nga 1977) cũng là loại ròng rọc dây kéo nhưng cách làm việc khác hẳn các loại trên, kể cả với loại ròng rọc White (hình 15).
Ròng rọc 1 và 4 liền khối quay quanh tâm B. Ròng rọc 2 quay quanh tâm D của móc 6 treo vật 5 có trọng lượng Q ở đầu C. Dây kéo 3 mắc qua ròng rọc 1, 2 và 4. Để nâng vật 5, kéo nhánh d của dây 3 theo chiều mũi tên.

Để tính lực kéo P, gọi:
- Bán kính ròng rọc 1 là R, bán kính ròng rọc 4 là r
- Lực căng của nhánh dây b, c là Nb, Nc. Nb = Nc do không có ma sát trên ròng rọc 2.
- Lực căng của nhánh d chỉ có từ chỗ đặt lực kéo P trở lên.
- Lực căng của nhánh a: Na = 0.
Xét cân bằng của ròng rọc 2 có: Nb = Nc = Q/(2cosα)
α là góc nghiêng so với phương thẳng đứng của nhánh b và c.
Từ phương trình cân bằng mô men của khối ròng rọc 1, 4 có:
Nb.R - Nc.r - P.R = 0
Tính được: P= Q.(R - r)/(2R.cosα)
Nếu chọn r xấp xỉ R để hiệu (R - r) thật bé thì P rất bé so với Q.
Ví dụ coi α = 0 độ (coi bán kính ròng rọc 2 xấp xỉ bán kính ròng rọc 1, 4) thì
P = (Q/2).(1 - (r/R))
Với r/R = 0,9 thì P = Q/20.
Chú ý:
- Nếu không đủ ma sát giữa ròng rọc 1, 4 với dây, dây bị trượt, thì cơ cấu không làm việc được. Bởi vậy tốt nhất là làm ròng rọc 1 và 4 có răng và dây 3 là dây xích kéo.
- Vật liệu nằm giữa hai tiết diện chứa rãnh dây của ròng rọc 1, 4 chịu mô men xoắn.
Trên hình 3b là loại tời, sách cổ gọi là tời Trung Hoa, có cách làm việc giống cơ cấu hình 3a: hai tang quay liền khối (bán kính R, r) và hai đầu dây kéo kẹp chặt với tang, không trượt.
Một vòng quay của trục đưa vật lên được một khoảng:
h = π (R - r)
Để tính lực P đặt vào tay quay bán kính l có thể dùng định luật bảo toàn công:
Công sinh ra khi quay 1 vòng = P.π.2l
Công để đưa vật lên h (1 vòng quay của tang) = Q.h = Q.π (R - r).
Hai công này phải bằng nhau, suy ra:
P = Q.(R - r)/2l
Nếu chọn r xấp xỉ R để hiệu (R - r) thật bé thì P rất bé so với Q, bé hơn nhiều so với loại tời chỉ có 1 tang quay.
1. Ròng rọc White (hình 15) là cơ cấu rất thú vị.
Dịch: Hình 15 cho thấy cơ cấu gọi là ròng rọc White. Cơ cấu này có thể gồm các ròng rọc lồng không riêng rẽ hoặc một khối đặc trên đó có các rãnh mà đường kính của chúng tỷ lệ với vận tốc của dây; tức là 1, 3 và 5 trên một khối và 2, 4 và 6 cho khối kia. Hệ số tăng lực từ 1 đến 7 (?).
Cơ cấu này là sáng chế của James White in trong cuốn "A new century of inventions" của ông xuất bản năm 1822, 529 trang, mô tả 100 loại máy, có trên Internet, download được.
Hình 1b là ròng rọc White mà mỗi khối có đến 6 ròng rọc.
Nếu mỗi khối là các ròng rọc lồng không riêng rẽ thì giống cơ cấu trên hình 14 dưới đây, hệ số giảm lực bằng 2 lần số ròng rọc động ở khối dưới (có trục di động). Nhược điểm là phải tách đủ xa các ròng rọc để chúng không cọ vào nhau gây mòn, kết cấu cũng phức tạp.
Nếu khối trên và khối dưới gồm các ròng rọc ghép cứng với nhau, đường kính bằng nhau thì tránh được nhược điểm trên nhưng dây sẽ trượt trên ròng rọc, gây mòn nhanh. Để tránh trượt dây, người ta làm đường kính rãnh dây khác nhau theo tỷ lệ nêu trên.
► Mời các bạn nghiệm lại kết quả tính toán của người xưa về các tỷ lệ 1, 3, 5 và 2, 4, 6 cho ròng rọc hình 1a. Cũng không dễ đâu.
2. Hình dưới đây là các kiểu phối hợp dây kéo và ròng rọc.
Cơ cấu hình 12, 13, 14 đã quen nhưng hình 16 đến 22 thì lạ rồi.
► Mời các bạn tính lực P kéo ở đầu dây để nâng trọng lượng Q cho các hình này.
Chú ý là lực căng trên các nhánh của cùng 1 dây kéo luôn bằng nhau.
Kết quả của tôi như sau (nếu sai thì sửa giúp):
Hình 12: P = Q (có tác dụng chuyển hướng kéo)
Hình 13: P = Q/2
Hình 14: P = Q/6
Hình 16: P = Q/4
Hình 18: P = Q/3
Hình 19: P = Q/26
Hình 20: P = Q/7
Hình 21: P = Q/3
Hình 22: P = Q/8
Riêng hình 17 có nhánh dây xiên góc α so với phương thẳng đứng. Góc này thay đổi trong quá trình kéo. Một cách gần đúng, coi góc của lực kéo P cũng là α. Kết quả: P = Q/(5cosα).
3. Cơ cấu sau (hình 3a, sách Nga 1977) cũng là loại ròng rọc dây kéo nhưng cách làm việc khác hẳn các loại trên, kể cả với loại ròng rọc White (hình 15).
Ròng rọc 1 và 4 liền khối quay quanh tâm B. Ròng rọc 2 quay quanh tâm D của móc 6 treo vật 5 có trọng lượng Q ở đầu C. Dây kéo 3 mắc qua ròng rọc 1, 2 và 4. Để nâng vật 5, kéo nhánh d của dây 3 theo chiều mũi tên.
Để tính lực kéo P, gọi:
- Bán kính ròng rọc 1 là R, bán kính ròng rọc 4 là r
- Lực căng của nhánh dây b, c là Nb, Nc. Nb = Nc do không có ma sát trên ròng rọc 2.
- Lực căng của nhánh d chỉ có từ chỗ đặt lực kéo P trở lên.
- Lực căng của nhánh a: Na = 0.
Xét cân bằng của ròng rọc 2 có: Nb = Nc = Q/(2cosα)
α là góc nghiêng so với phương thẳng đứng của nhánh b và c.
Từ phương trình cân bằng mô men của khối ròng rọc 1, 4 có:
Nb.R - Nc.r - P.R = 0
Tính được: P= Q.(R - r)/(2R.cosα)
Nếu chọn r xấp xỉ R để hiệu (R - r) thật bé thì P rất bé so với Q.
Ví dụ coi α = 0 độ (coi bán kính ròng rọc 2 xấp xỉ bán kính ròng rọc 1, 4) thì
P = (Q/2).(1 - (r/R))
Với r/R = 0,9 thì P = Q/20.
Chú ý:
- Nếu không đủ ma sát giữa ròng rọc 1, 4 với dây, dây bị trượt, thì cơ cấu không làm việc được. Bởi vậy tốt nhất là làm ròng rọc 1 và 4 có răng và dây 3 là dây xích kéo.
- Vật liệu nằm giữa hai tiết diện chứa rãnh dây của ròng rọc 1, 4 chịu mô men xoắn.
Trên hình 3b là loại tời, sách cổ gọi là tời Trung Hoa, có cách làm việc giống cơ cấu hình 3a: hai tang quay liền khối (bán kính R, r) và hai đầu dây kéo kẹp chặt với tang, không trượt.
Một vòng quay của trục đưa vật lên được một khoảng:
h = π (R - r)
Để tính lực P đặt vào tay quay bán kính l có thể dùng định luật bảo toàn công:
Công sinh ra khi quay 1 vòng = P.π.2l
Công để đưa vật lên h (1 vòng quay của tang) = Q.h = Q.π (R - r).
Hai công này phải bằng nhau, suy ra:
P = Q.(R - r)/2l
Nếu chọn r xấp xỉ R để hiệu (R - r) thật bé thì P rất bé so với Q, bé hơn nhiều so với loại tời chỉ có 1 tang quay.
Last edited:





